
MATERIA
LABORATORIO DE ELECTRONICA
TEMA
SENSORES
OBJETIVO
Que el alumno conozca los principales tipos de sensores, aplicados en la industria, especialmente en la automatización de procesos, por medio del diseño, armado y funcionamiento de una palanca automatizada.
ESCENARIO
Se llama sensor al instrumento que produce una señal, usualmente eléctrica (antaño se utilizaban señales hidráulicas), que refleja el valor de una propiedad, mediante alguna correlación definida (su ganancia). En términos estrictos, un sensor es un instrumento que no altera la propiedad sensada. Por ejemplo, un sensor de temperatura sería un instrumento tal que no agrega ni cede calor a la masa sensada, es decir, en concreto, sería un instrumento de masa cero o que no contacta la masa a la que se debe medir la temperatura (un termómetro de radiación infrarroja, p.e.)
Existe, además, el concepto estricto de transductor: un instrumento que convierte una forma de energía en otra (o una propiedad en otra). Por ejemplo, un generador eléctrico en una caída de agua es un conocido transductor de energía cinética de un fluido en energía eléctrica; sobre esta base se podría pensar, por ejemplo, en un transductor de flujo a señal eléctrica consistente de un pequeño generador a paletas movilizado por el caudal a medir. Los transductores siempre retiran algo de energía desde la propiedad medida, de modo que al usarlo para obtener la cuantificación de una propiedad en un proceso, se debe verificar que la pérdida no impacte al proceso sensado en alguna magnitud importante. Para ilustrar la diferencia entre sensores y transductores se discutirá un transductor y un sensor de velocidad de giro de un eje, utilizado típicamente para manejar el grado de mezcla de un reactor en el que cambian las propiedades reológicas de un fluido no newtoniano. Para medir el grado de agitación se utilizan correlaciones que indican, finalmente, que el mezclado es función de la velocidad angular del eje de impulsión (además del tipo de aspa, del radio, la profundidad, etc.). Para medir la velocidad angular del eje se utilizan tacómetros: instrumentos para medir frecuencia angular de rotación (es decir, número de vueltas en una unidad de tiempo, usualmente expresado en revoluciones por minuto o RPM).
TAREA
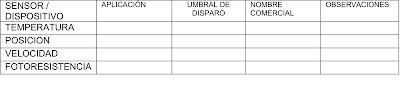
1. Investiga en Internet los principales sensores de temperatura, de posición, medidores de velocidad, foto elementos aplicados en los procesos industriales.
2. Investiga las características eléctricas de los sensores encontrados en el manual de reemplazo ECG.
3. Realiza el llenado de este cuadro
RECURSOS
http://www.superrobotica.com/
http://es.wikipedia.org/wiki/Robótica
http://www.todorobot.com.ar/
http://www.depi.itch.edu.mx/apacheco/expo/html/ai10/
PRODUCTO
2. Realiza el diseño de un brazo que se eleve cuando un objeto este cerca y que baje cuando se aleje, (muy parecido al de las casetas de cobro).
3. Anota tus observaciones, e intercambia las experiencias con otros equipos, realiza una exposición en clase con los resultados obtenidos



No hay comentarios.:
Publicar un comentario